R1 硬件介绍
技术规格
| 机械参数 | 数值 |
|---|---|
| 高度 | 1700 mm |
| 宽度 | 675 mm |
| 重量 | 96 KG(含电池) |
| 额定电压 | 48 V |
| 额定容量 | 35 Ah |
| 电源 | 锂离子电池 |
| 电池能量 | 1680 Wh |
| 电池管理系统 (BMS) | 支持 |
| 通风系统 | 低噪音局部空气冷却 |
| 风道数量 | 2 |
| 性能参数 | 数值 |
|---|---|
| 自由度 | 全身共24 DOF: 底盘6 DOF 躯干4 DOF 单臂带夹爪7 DOF |
| 手臂负载 | 额定: 2.5 KG@0.5 m最大: 5 KG@0.5 m |
| 操作范围 | 垂直: 0 ~ 2000 mm水平: 700 mm (包括夹爪860 mm) |
| 功能 | 躯干:升降/横摆/俯仰底盘:阿克曼/平移/旋转 |
| 控制功能 | 数值 |
|---|---|
| 遥控器 | 无线频率: 2.4 G最大遥控范围: 1.5 km |
| 通信接口 | 以太网,USB |
机器人结构
头部
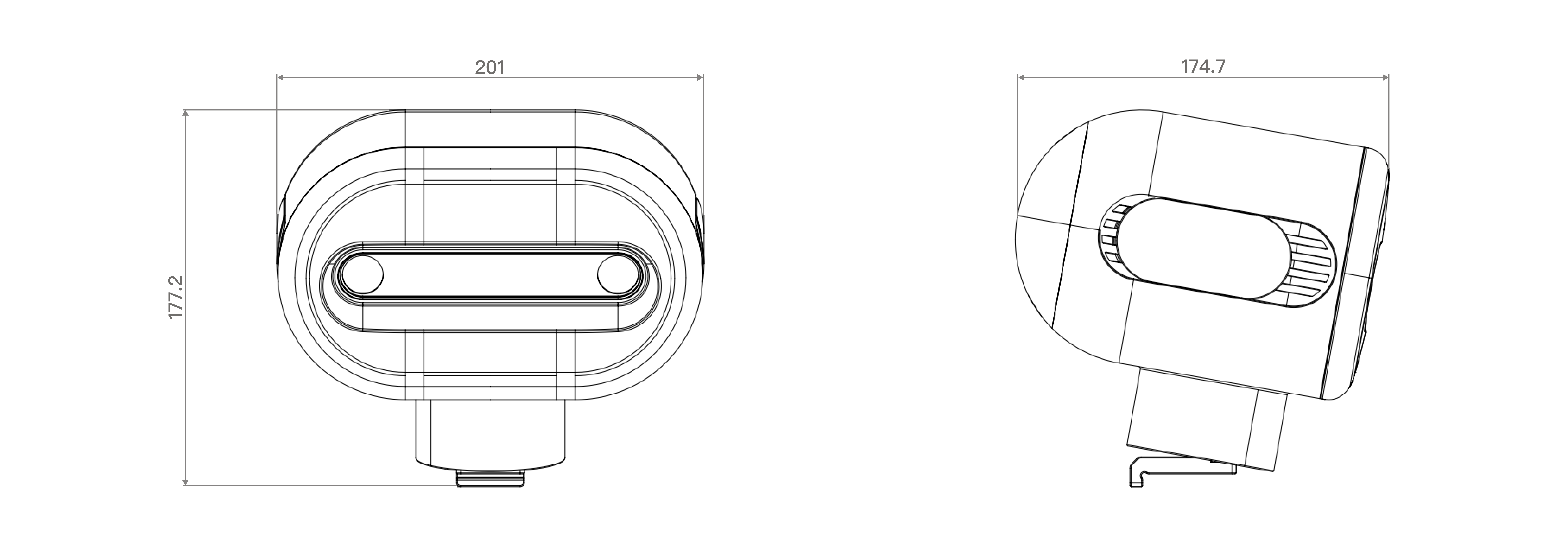
Galaxea R1 头部配备了双目立体相机。
手臂
Galaxea R1 配备了两只 Galaxea A1 机械臂和两个 Galaxea G1 夹爪。手臂6个关节配备了高精度和大扭矩的行星电机,能够实现独立的变速操作。
重要提示:目前关节电机没有制动器,为了您的安全,在关闭R1电源之前,请用手扶住两只手臂,以防止其突然坠落。
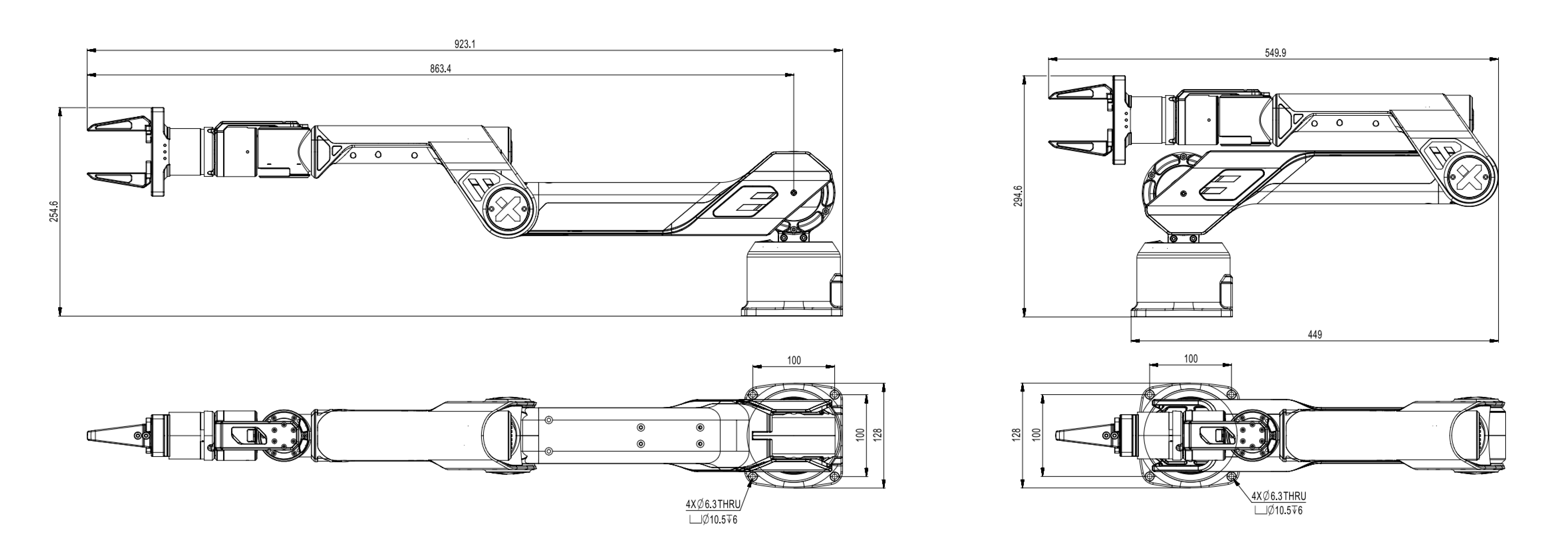
| 手臂 | 备注 |
|---|---|
| 尺寸 | 展开:863L x 128W mm折叠:550L x 254W mm |
| 自由度 | 6自由度手臂 + 夹爪 |
| 峰值负载 | 单臂 5kg |
| 重量 | 6.2 kg |
| 夹爪额定力 | 100 N |
| 夹爪运动范围 | 0 ~ 100 mm |
如需了解更多信息,请参考Galaxea A1 User Guide。
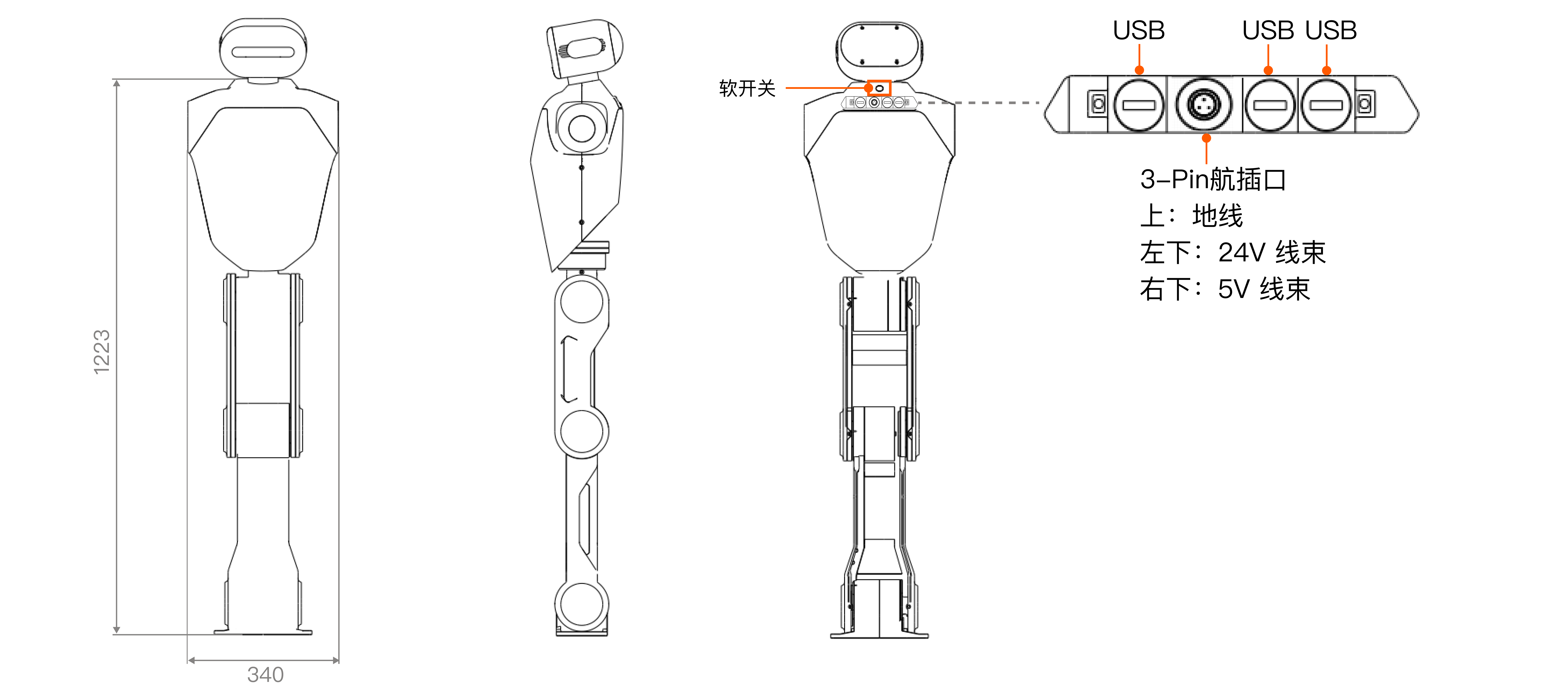
躯干
| 条目 | 备注 |
|---|---|
| 尺寸 | 1400H x 340W mm |
| 功能 | 升降/横摆/俯仰 |
| 腰部运动空间(偏航) | ± 170° |
| 臀部运动空间(俯仰) | ± 100° |
| 膝关节运动空间 | W1: 0°~100° W2: -154°~145° |
| 躯干电机扭矩 | 额定: 108 Nm 最大: 304 Nm |
| 软开关 | 用于开启/关闭R1电源。 |
| USB接口 | 用于连接鼠标和键盘等外部设备。 |
| 3-Pin 航空插头 | 用于为外部设备供电。粗红线(24V),细红线(5V),黑线(地线)。 |
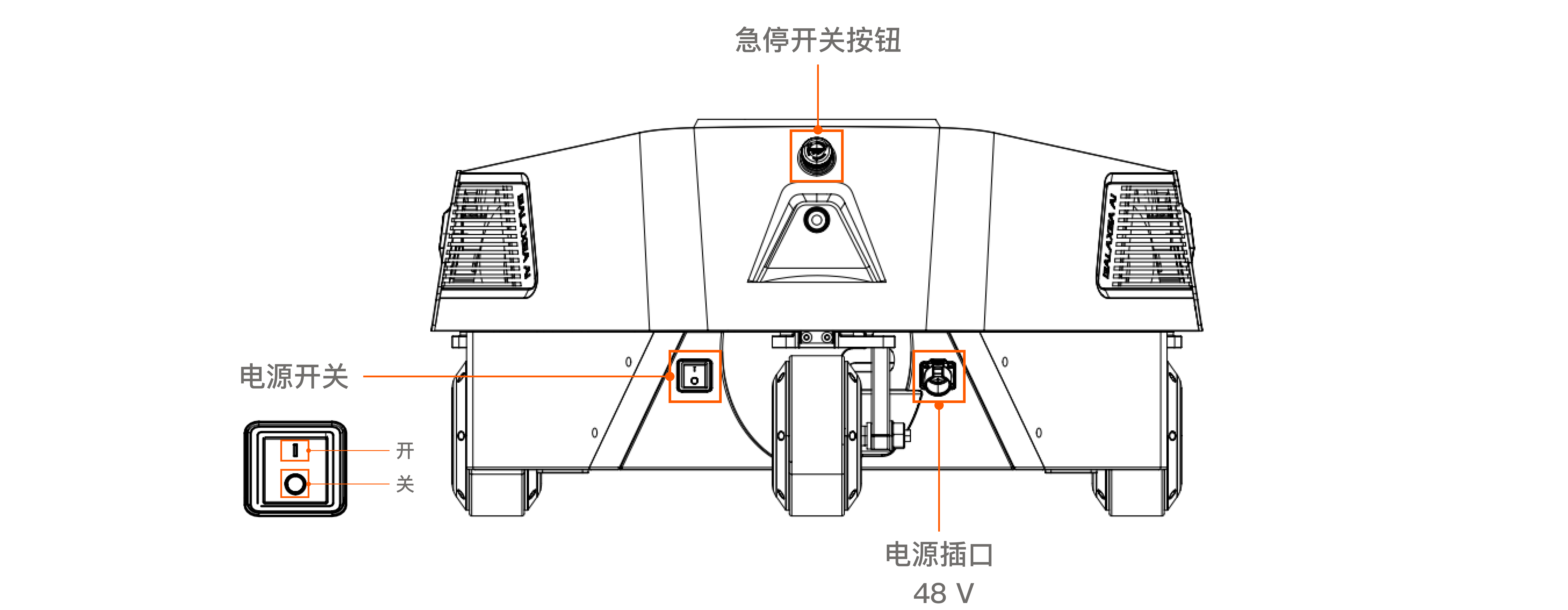
底盘
| 底盘 | 备注 |
|---|---|
| 尺寸 | 675L x 636W x 346H mm |
| 电源按钮 | 用于开/关R1电源。 |
| 电源插口 | 额定电压 48 V |
| 紧急停止按钮 | 紧急或危险情况下,按下可立即停止所有操作。 |
| 风道 | 用于散发机器内部产生的热量,防止因过热导致性能下降或不稳定。 |
| 电池指示器 | 三色呼吸灯显示电源使用状态。🟩绿色:70%以上🟨黄色:30% ~ 70%🟥红色:低于30%绿色闪烁:充电中 |
外设接口位于底盘后侧顶部。

| 外设接口 | 备注 |
|---|---|
| 以太网口 | 用于连接以太网。 |
| HDMI | 用于连接显示屏。 |
| 3-Pin 对外供电插口 | 用于为外部设备供电:粗红线(24V),细红线(5V),黑线(地线)。 |
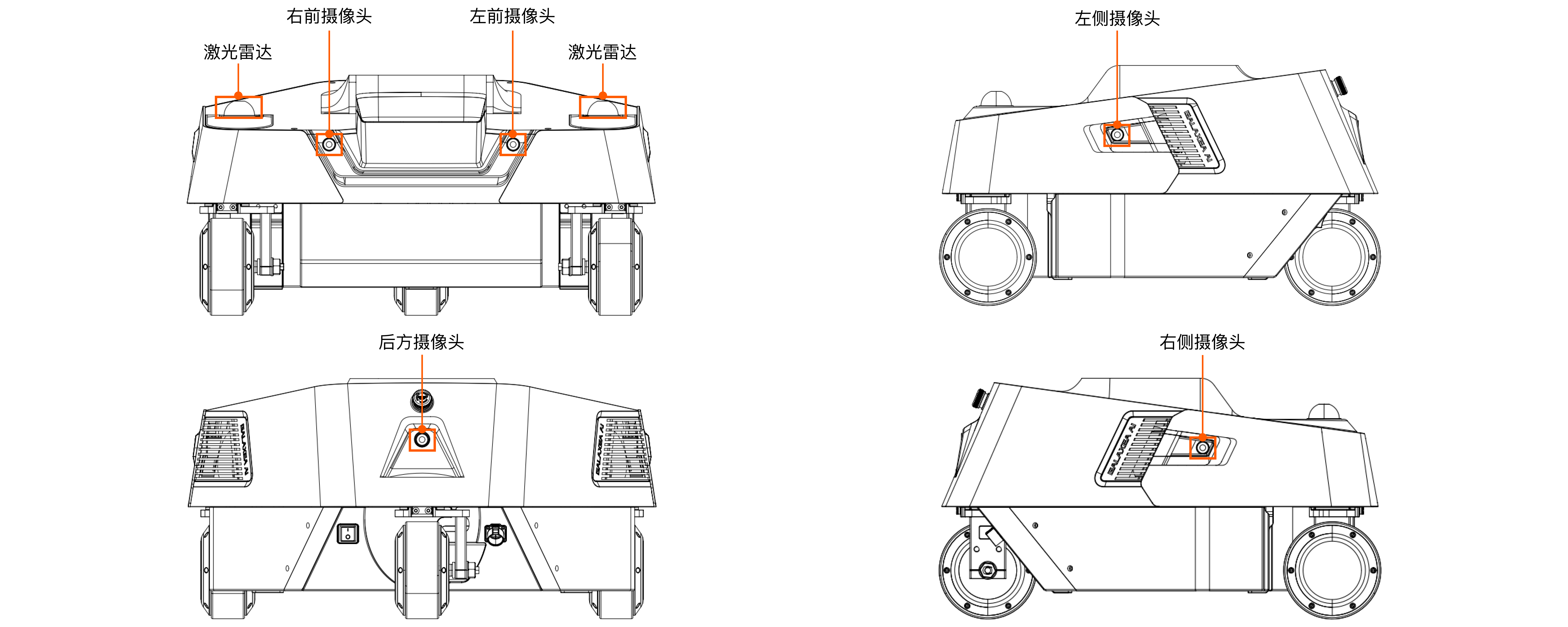
传感器
Galaxea R1配备了多种传感器,其中包括9个高清摄像头和2个激光雷达,使其不仅能够全方位感知周围环境,还能实现精确操作。

| 传感器 | 数值 |
|---|---|
| 相机 | 头部:1 x 双目相机 腕部:2 x 单目相机 底盘:5 x 单目相机 |
| 激光雷达 | 1 x 360°(可选配两个激光雷达) |
相机
| 规格 | 头部 | 腕部 | 底盘 |
|---|---|---|---|
| 类型 | 双目相机 | 单目相机 | 单目相机 |
| 数量 | 1 | 2 | 5 |
| 输出分辨率 | 1920 x 1080 @30FPS | 1280 x 720 @30FPS | 1920 x 1080 @30FPS |
| 视场角 | 110°H x 70°V | 87°H x 58°V x 95°D | 118°H x 62°V |
| 深度范围 | 0.3 m ~ 20 m | 0.2 m ~ 3 m | \ |
| 工作温度 | -10 °C ~ +45°C | 0 ~ +85°C | -40 ~ +85°C |
| 尺寸 | 175L x 30W x 32H mm | 90L x 25W x 25H mm | 30L x 30W x 23H mm |
| 重量 | 164 g | 75 g | <50 g |
激光雷达
底盘配备360°激光雷达,精度高且抗干扰能力强。
| 条目 | 说明 |
|---|---|
| 数量 | 1 ~ 2 |
| 视场角 | 360°H x 59°V |
| 激光波长 | 905 nm |
| 近距离盲区 | 0.1 m |
| 数据端口 | 100 BASE-TX 以太网 |
| IMU | 内置IMU |
| 工作温度范围 | -20 ~ +55°C |
| 尺寸 | 65L x 65W x 60H mm |
| 重量 | 265 g |
提示:标配1个激光雷达,可根据用户需求选择激光雷达配置数量。
计算单元
| 单元 | 单 SoC | 双 SoC |
|---|---|---|
| 基本计算能力 | 8核 2.2GHz CPU | 2 * 8核 2.2GHz CPU |
| 深度学习能力 | 200 TOPS | 550 TOPS |
| 内存芯片 | 1 x LPDDR5@32G | 2 x LPDDR5@32G |
| 硬盘 | 1 x SSD@1T | 2 x SSD@512G |
| 相机 | 8 x GMSL | 8 x GMSL (SoC-1) + 8 x GMSL (SoC-2) |
| 以太网 | 4 x 千兆以太网 (M12) | 3 x SoC-1 千兆以太网 (M12) + 3 x SoC-2 千兆以太网 (M12) |
| WiFi 模块 | M.2 WiFi 带AP模式 | M.2 WiFi 带AP模式 |
如需不同配置,请联系我们。
下一步
Galaxea R1 硬件指南已经介绍完毕。如需了解其他详细信息,请参阅Galaxea R1软件指南。