R1 Pro Demo Guide
Preparation Before Use
Before you start, please ensure that:
- Two arms are correctly installed. At this time, the elbow bend (the black rubber) should face directly forward; the gripper points vertically downward towards the ground, and the gripper cable faces outward.
- The torso is in the standing pose.
- No personnel and obstacles within a radius of 1.5 meters. (As shown in the figure below.)

Demo
Important Notice: For your safety, in the event of danger during testing, you must press Ctrl + C in the Python 3 terminal running r1pro_test_open_box.py to immediately stop the ongoing action.
- arm_test_1: Raise both arms vertically upward, then lower them back down, with the grippers pointing straight downward toward the ground.
- arm_test_2: Raise both arms upward from the sides of the body.
- arm_test_3: Both arms move to the chest first, then demonstrate Tai Chi movements. (This action is used to test the J1/J2/J3/J4/J5/J6/J7 arm motors.)
- torso_test_1: The torso bends down to squat, while the arms fold together on both sides of the chest. (This action is used to test the T1/T2/T3 torso motors.)
- torso_test_2: The torso rises to stand, while the arms drop to both sides of the torso. Then the waist turns 45° to the left, then 90° to the right, then 45° to the left again, and finally the torso returns to the center. (This action is used to test the T4 torso motor.)
Script Execution
Note: Please strictly follow the sequence for demonstration. If any errors occur, please press Ctrl + C to close the program immediately and contact us for technical support.
-
Stop all running TMUX in the background and close all ROS programs.
-
Enter tmux.
-
Start FDCAN communication.
bash ~/can.sh # You may need to enter the password again: nvidia # If you encounter the error message "RTNETLINK answers: Device or resource busy", it usually means that the device you are trying to configure (such as a network interface or CAN transceiver) has already been configured and is running. -
Press
Ctrl + BthenCto create a new terminal and execute the startup file. -
Press
Ctrl + BthenCto create a new terminal and start executing the script. -
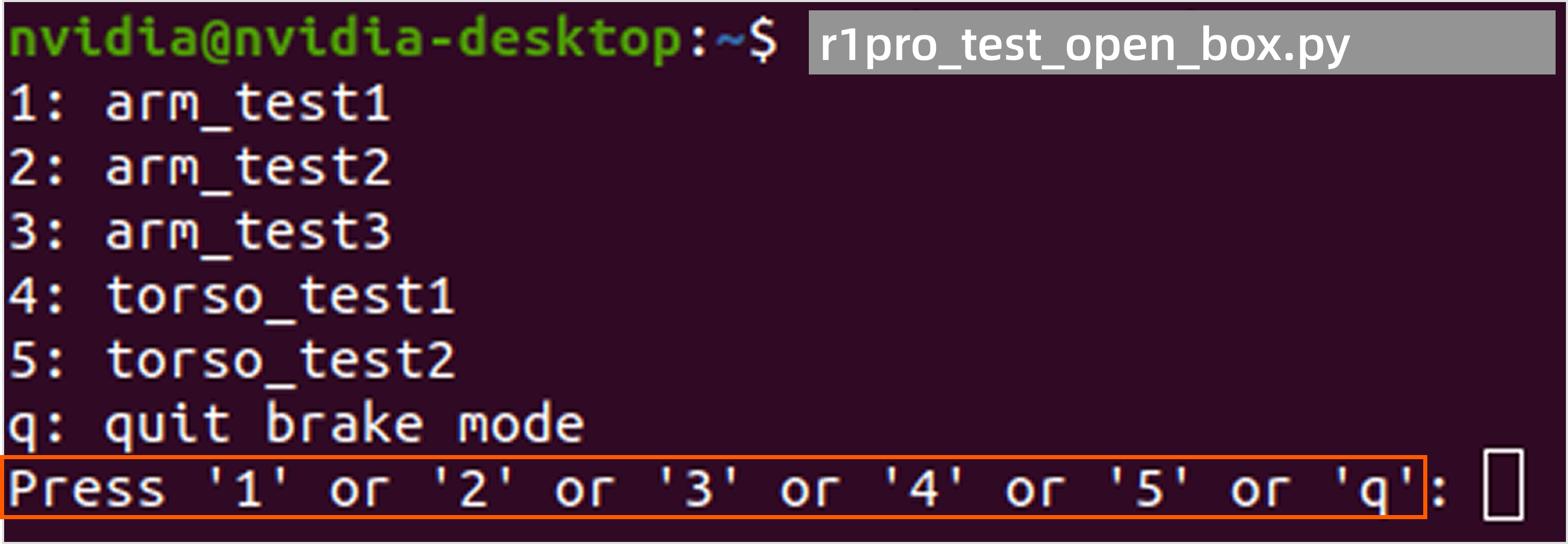
Enter the corresponding number for each action and press Enter. R1 will then begin executing the demo actions.
-
When all actions are completed, press
qto exit. R1 will return to the zero position.