Galaxea R1 Software Version_V1.0.1_Changelog
Release Notes
Product Name: Galaxea R1
Software Version: SDK V1.1.0
Ubuntu System: 20.04 LTS
ROS Version: ROS 1 Noetic
Release Date: December 11, 2024 (GMT +8)
Update Content:
-
Fixed vulnerabilities in the check_node.
-
Updated URDF to V_2_1_0, aligning the coordinate system with Mobiman.
- Updated XCU, improving the TCU and CCU IMU resolution to 0.000x level.
- Optimized Lidar data format in Livox_ros_driver.
Update Instruction
- The upgrade script will automatically delete all files in /home/nvidia/work/ci_pipeline. Please ensure that all files in this directory are backed up before upgrading to avoid data loss.
- Before performing the OTA update, please ensure that the robot R1 is fully assembled (including both arms) to avoid update failure.
- During the upgrade process, do not interrupt the system operation or perform any control actions, as this may cause the upgrade to fail and affect normal system operation.
- After the upgrade is complete, power off the R1 system and then power it back on to ensure the update is fully applied.
Please follow the tutorial below to complete this system update. If you encounter any issues, contact us at support@galaxea.ai for technical support!
Update Tutorial
Download the Update Package
Software_V1.0.1_Release.tar.gz
- Google Drive:R1 SDK V1.0.1
- Baidu Cloud: R1 SDK V1.0.1
Extract the Package
Update the Embedded Firmware
cd ~/work/galaxea/install/share/Embedded_Software_Firmware/tools/R1
source ~/work/galaxea/install/setup.bash
bash r1_embedded_firmware_upgrade.sh ../../firmware/R1/V1_0_0

Note: After completing the update, power off the R1 and then power it back on.
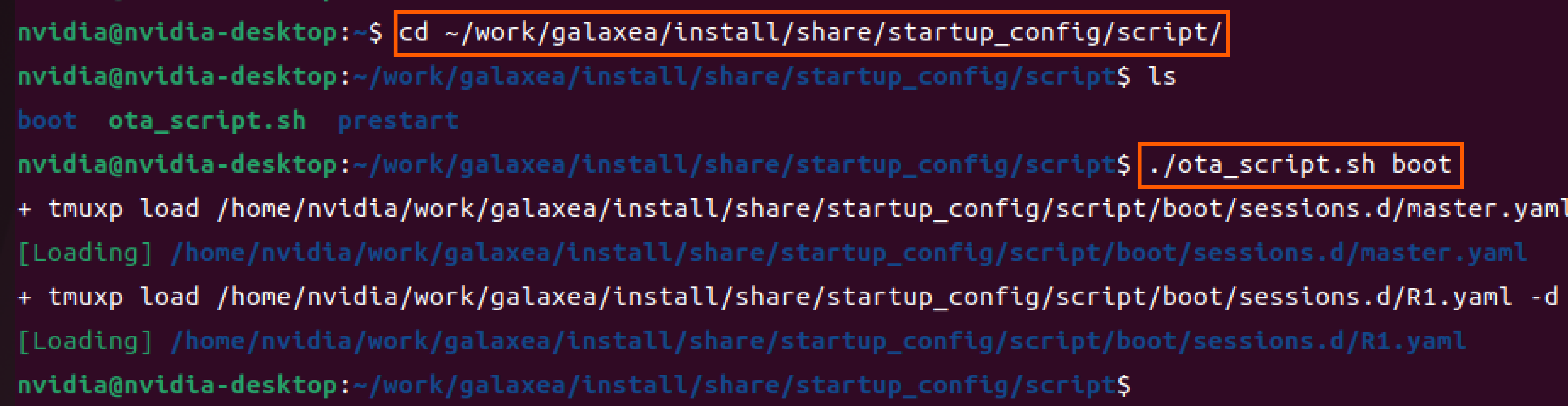
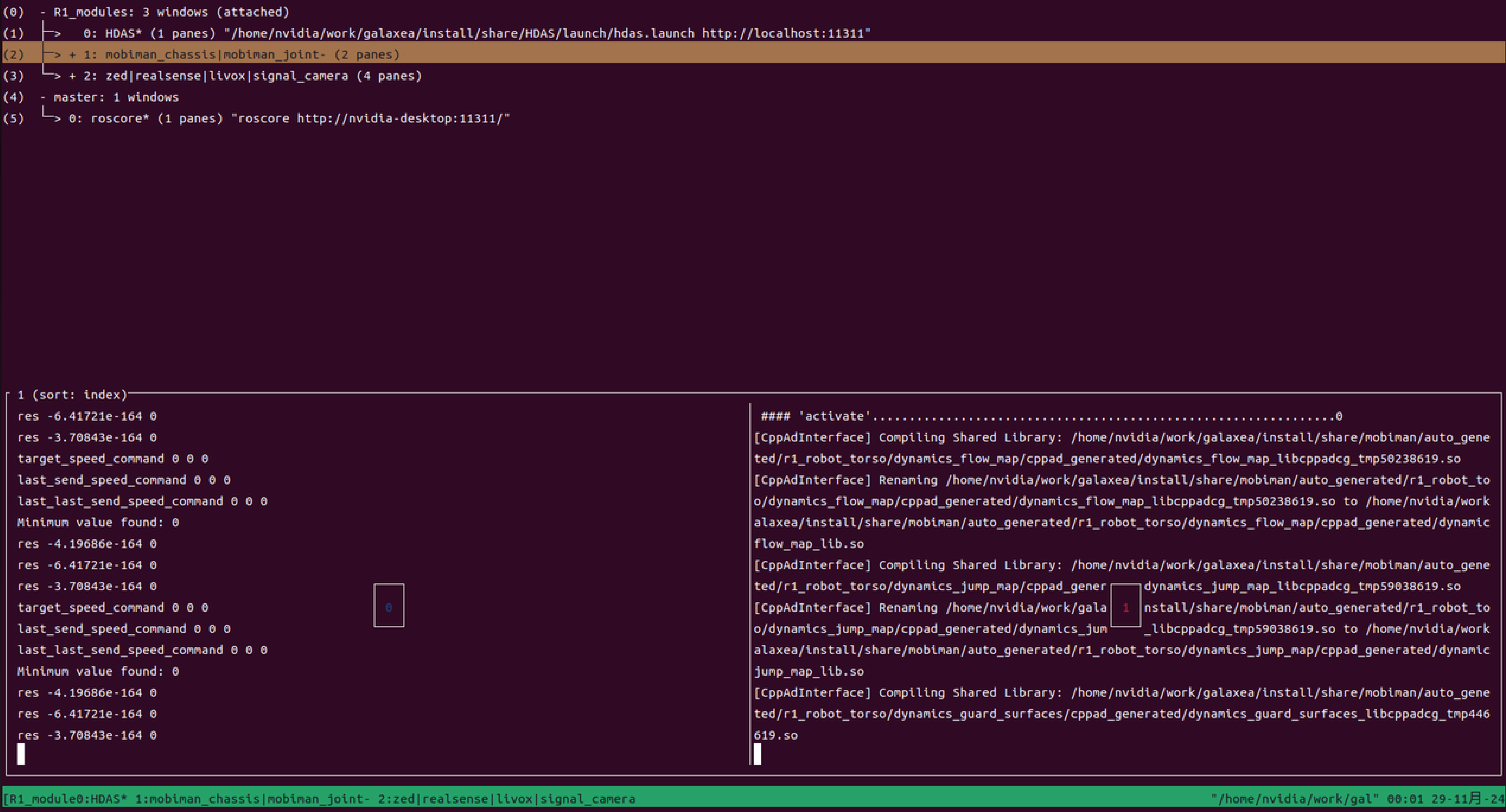
Execute the Module